センシンググループ
センシンググループとは
センシンググループでは,電波の性質を利用して得られる情報を活用した新しい無線システムの創出を目指しています. 現在は,位置推定チームと端末識別チームの2つのチームで構成されています. 位置推定チームでは,豊橋技術科学大学構内でWiFiなどの受信信号強度(RSSI: Received Signal Strength Indicator)を用いた位置推定システムの開発に取り組んでおり, 屋内環境で使用が困難な全地球測位システム(GPS)に代わる位置推定システムの創生を目指しています. 端末識別チームでは,電波の歪みを用いた端末識別について研究しており, センサネットワークなどで使用される小型の無線通信端末の情報セキュリティ向上を目的としています.
単語帳
センシング,
センサネットワーク,
受信信号強度(RSSI),
全地球測位システム,
距離減衰特性,
電波位置指紋法,
重み付き重心法,
多辺測位,
端末識別,
センシング
センサから温度や湿度などの情報を得ること
センサネットワーク
無線通信機能を搭載したセンサノード(端末)を実環境中に配置して,センサによって収集した温度や湿度などの情報をシンク(基地局)に伝送することで情報収集を行うネットワーク
受信信号強度(RSSI)
端末が受信した電波の強さを示す指標
全地球測位システム
複数の人工衛星が発信する電波を利用して位置推定を行うシステム
距離減衰特性
電力が距離に対して減衰する特性
電波位置指紋法
各位置におけるRSSIの大きさを指紋のように保存しておき,位置推定時に取得したRSSIと比較することで位置を知る手法
重み付き重心法
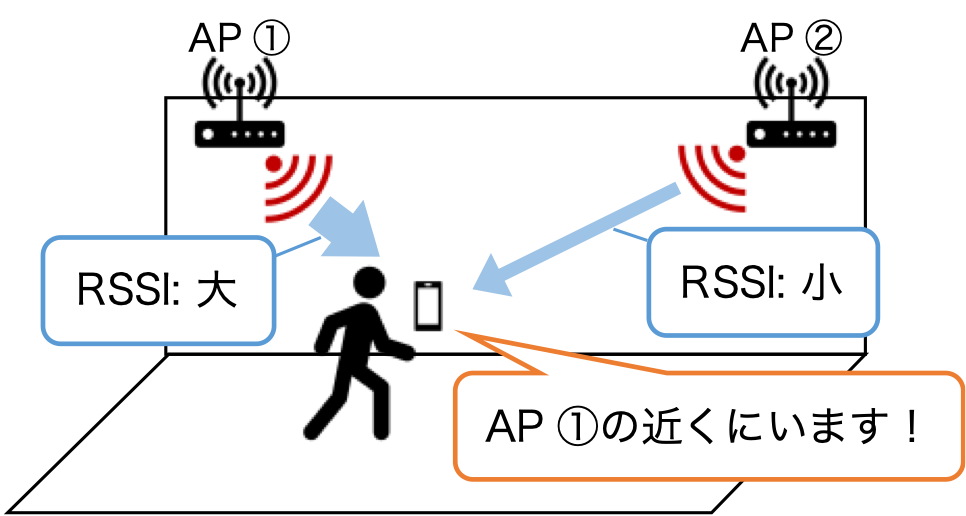
RSSIを取得できたAPの座標に,RSSIに基づく重みを付加してそれらの重心位置を推定位置とする位置推定の手法
多辺測位
RSSIを取得できたAPの座標と計測地点の距離を距離減衰特性からそれぞれ算出し、距離を半径とする円の交点を推定位置とする手法
端末識別
無線信号から送信端末の回路の歪みを抽出し,抽出した歪みを用いてどの送信端末から送信されたかを識別する技術
屋内環境における位置推定
屋内環境では障害物が多いため,RSSIの距離減衰特性が二乗則に従いません. そこで,APとの近接性を利用した重み付き重心法(WCL),RSSIを物理的な距離に換算して推定する多辺測位(Multilateration), 事前に取得したRSSIデータ(教師データ)をもとにパターンマッチングで位置を推定する電波位置指紋法に着目しています. 我々は,これらの手法をさらに発展させた研究を行っています.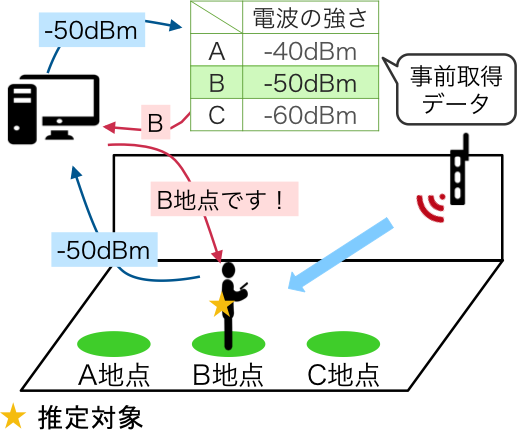
屋内環境における位置推定
重み付き重心法による位置推定
➢ 豊橋技術科学大学構内で使用可能な位置推定システムの開発
豊橋技術科学大学の構内に設置されているWi-Fiを利用し,新入生や外部のゲストなどの人物ナビゲーションを想定した位置推定システムの開発を行っています. 位置推定手法として重み付き重心法と多辺測位を採用し,位置推定精度の改善とシステム開発に取り組んでいます.
また,Wi-FiのAP以外にもBLEビーコンを学内に設置することによる推定精度の向上や教室の判定,階層の推定などシステムの拡張にも取り組んでいます.
電波の歪みを用いた端末識別
IoT(Internet of Things)端末の普及により,無線通信における情報セキュリティの向上が求められています. しかし,センサネットワークや産業用制御システムで用いられる無線通信端末は,低消費電力,低コストで動作する必要があり, 複雑な暗号化技術を利用することができません. この解決策として,無線通信回路の歪み(IQインバランスや増幅器の非線形性など)を利用した識別方法が注目されています. 高周波回路は製造時の精度のばらつきにより,電波に対し端末固有の変化を与えます. この変化を受信端末で受信した信号から特徴量として抽出することにより,ディジタル情報に依存せず端末を識別することが可能となります. 一方,この特徴量は端末の位置関係や障害物によって変化してしまい,端末識別に悪影響を及ぼします. 我々端末識別チームは,上記の問題を解決する方法について研究しています.
端末の個体差
